Field及其使用 Field是torchtext中定义数据类型以及转换为张量的指令。torchtext 认为一个样本是由多个字段(文本字段,标签字段)组成,不同的字段可能会有不同的处理方式,所以才会有 Field 抽象。定义Field对象是为了明确如何处理不同类型的数据,但具体的处理则是在Dataset中完成的。
from torchtext import data defget_dataset(csv_data, text_field, label_field, test=False): fields = [("id", None), # we won't be needing the id, so we pass in None as the field ("comment_text", text_field), ("toxic", label_field)] examples = []
if test: # 如果为测试集,则不加载label for text in tqdm(csv_data['comment_text']): examples.append(data.Example.fromlist([None, text, None], fields)) else: for text, label in tqdm(zip(csv_data['comment_text'], csv_data['toxic'])): examples.append(data.Example.fromlist([None, text, label], fields)) return examples, fields
词汇表(vocab) Word Embedding 的基本思想是收集一个比较大的语料库(尽量与所做的任务相关),在语料库中使用word2vec之类的方法构建词语到向量(或数字)的映射关系,之后将这一映射关系应用于当前的任务,将句子中的词语转为向量表示。在torchtext中可以使用Field自带的build_vocab函数完成词汇表构建。
# 同时对训练集和验证集进行迭代器的构建 train_iter, val_iter = BucketIterator.splits( (train, valid), # 构建数据集所需的数据集 batch_sizes=(8, 8), device=-1, # 如果使用gpu,此处将-1更换为GPU的编号 sort_key=lambda x: len(x.comment_text), # the BucketIterator needs to be told what function it should use to group the data. sort_within_batch=False )
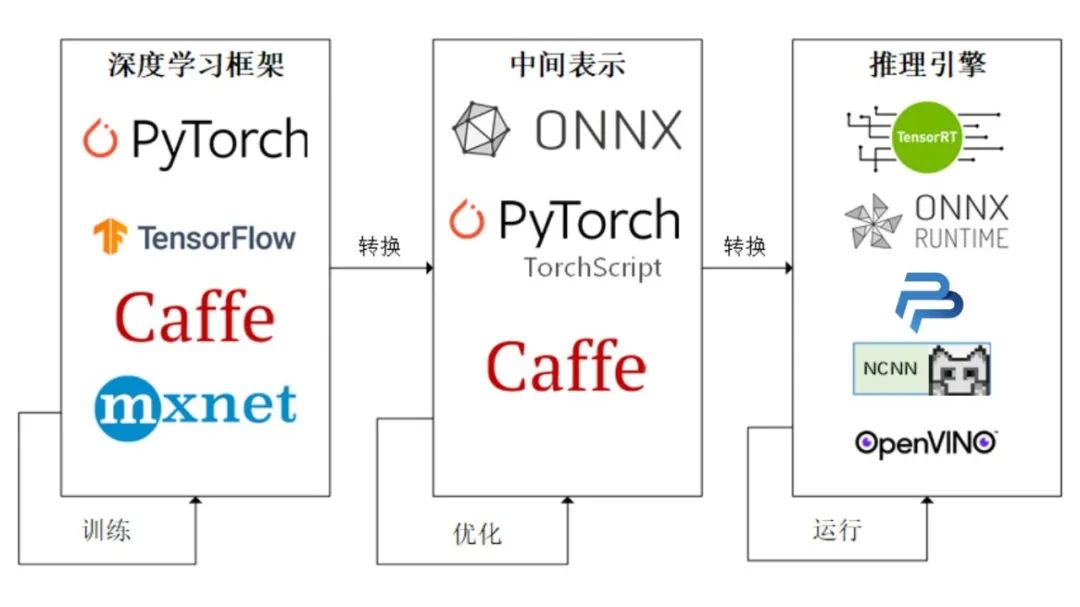
import onnx # 我们可以使用异常处理的方法进行检验 try: # 当我们的模型不可用时,将会报出异常 onnx.checker.check_model(self.onnx_model) except onnx.checker.ValidationError as e: print("The model is invalid: %s"%e) else: # 模型可用时,将不会报出异常,并会输出“The model is valid!” print("The model is valid!")
for ftidx inrange(total_ft): if ftidx > 99: break ft = first_item[ftidx] plt.subplot(10, 10, ftidx+1) plt.axis('off') #plt.imshow(ft[ :, :].detach(),cmap='gray') plt.imshow(ft[ :, :].detach())
CNN class activation map可视化方法
1 2 3 4 5 6 7 8 9 10 11 12 13
import torch from torchvision.models import vgg11,resnet18,resnet101,resnext101_32x8d import matplotlib.pyplot as plt from PIL import Image import numpy as np
from pytorch_grad_cam import GradCAM,ScoreCAM,GradCAMPlusPlus,AblationCAM,XGradCAM,EigenCAM,FullGrad from pytorch_grad_cam.utils.model_targets import ClassifierOutputTarget from pytorch_grad_cam.utils.image import show_cam_on_image
import matplotlib.pyplot as plt import torchvision.models as models from flashtorch.utils import apply_transforms, load_image from flashtorch.saliency import Backprop
model = models.alexnet(pretrained=True) backprop = Backprop(model)
defforward(self,x): x = self.conv1(x) x = self.pool(x) x = self.conv2(x) x = self.pool(x) x = self.adaptive_pool(x) x = self.flatten(x) x = self.linear1(x) x = self.relu(x) x = self.linear2(x) y = self.sigmoid(x) return y
writer = SummaryWriter('./pytorch_tb') for i inrange(500): x = i y = x**2 writer.add_scalar("x", x, i) #日志中记录x在第step i 的值 writer.add_scalar("y", y, i) #日志中记录y在第step i 的值 writer.close()
writer1 = SummaryWriter('./pytorch_tb/x') writer2 = SummaryWriter('./pytorch_tb/y') for i inrange(500): x = i y = x*2 writer1.add_scalar("same", x, i) #日志中记录x在第step i 的值 writer2.add_scalar("same", y, i) #日志中记录y在第step i 的值 writer1.close() writer2.close()
TensorBoard参数分布可视化
1 2 3 4 5 6 7 8 9 10 11 12 13 14
import torch import numpy as np
# 创建正态分布的张量模拟参数矩阵 defnorm(mean, std): t = std * torch.randn((100, 20)) + mean return t writer = SummaryWriter('./pytorch_tb/') for step, mean inenumerate(range(-10, 10, 1)): w = norm(mean, 1) writer.add_histogram("w", w, step) writer.flush() writer.close()
defadjust_learning_rate(optimizer, epoch): lr = args.lr * (0.1 ** (epoch // 30)) # 学习率每30轮下降为原来的1/10 for param_group in optimizer.param_groups: param_group['lr'] = lr
# 对不同大小的图片进行处理 # 构建pipline seq = iaa.Sequential([ iaa.CropAndPad(percent=(-0.2, 0.2), pad_mode="edge"), # crop and pad images iaa.AddToHueAndSaturation((-60, 60)), # change their color iaa.ElasticTransformation(alpha=90, sigma=9), # water-like effect iaa.Cutout() # replace one squared area within the image by a constant intensity value ], random_order=True)
if __name__ == '__main__': set_seed(manual_seed) for epoch inrange(niters): train(model,lr,batch_size,num_workers,checkpoint_path) val(model,lr,batch_size,num_workers,checkpoint_path)
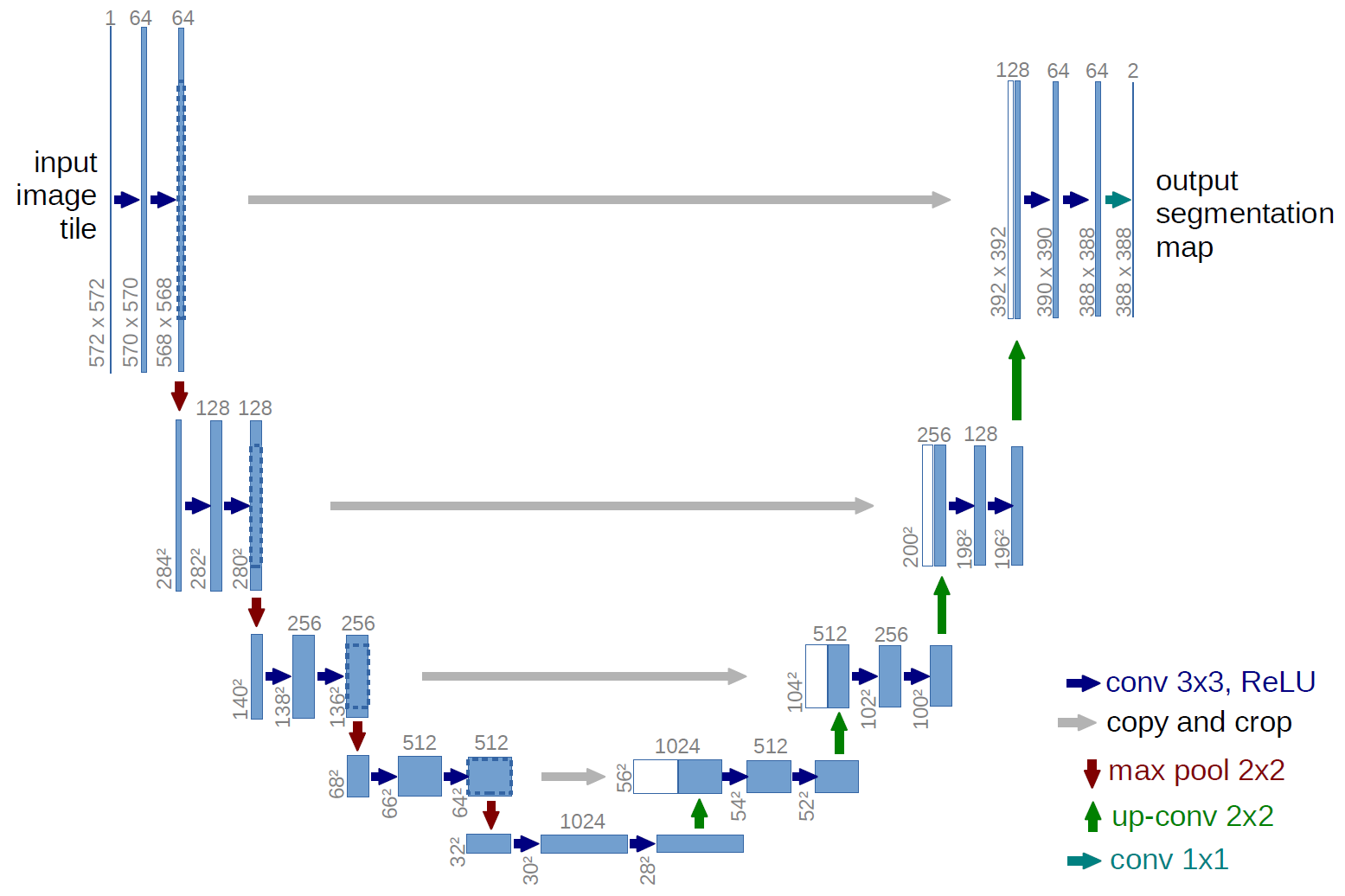
# if bilinear, use the normal convolutions to reduce the number of channels if bilinear: # 插值 self.up = nn.Upsample(scale_factor=2, mode='bilinear', align_corners=True) self.conv = DoubleConv(in_channels, out_channels, in_channels // 2) else: self.up = nn.ConvTranspose2d(in_channels, in_channels // 2, kernel_size=2, stride=2) self.conv = DoubleConv(in_channels, out_channels)
# 卷积运算(二维互相关) defcorr2d(X, K): h, w = K.shape X, K = X.float(), K.float() Y = torch.zeros((X.shape[0] - h + 1, X.shape[1] - w + 1)) for i inrange(Y.shape[0]): for j inrange(Y.shape[1]): Y[i, j] = (X[i: i + h, j: j + w] * K).sum() return Y
defforward(self, x): # 2x2 Max pooling x = F.max_pool2d(F.relu(self.conv1(x)), (2, 2)) # 如果是方阵,则可以只使用一个数字进行定义 x = F.max_pool2d(F.relu(self.conv2(x)), 2) x = x.view(-1, self.num_flat_features(x)) x = F.relu(self.fc1(x)) x = F.relu(self.fc2(x)) x = self.fc3(x) return x
defnum_flat_features(self, x): size = x.size()[1:] # 除去批处理维度的其他所有维度 num_features = 1 for s in size: num_features *= s return num_features
loss = nn.MultiLabelMarginLoss() x = torch.FloatTensor([[0.9, 0.2, 0.4, 0.8]]) # for target y, only consider labels 3 and 0, not after label -1 y = torch.LongTensor([[3, 0, -1, 1]])# 真实的分类是,第3类和第0类 output = loss(x, y) print('MultiLabelMarginLoss损失函数的计算结果为',output)
# Target are to be padded T = 50# Input sequence length C = 20# Number of classes (including blank) N = 16# Batch size S = 30# Target sequence length of longest target in batch (padding length) S_min = 10# Minimum target length, for demonstration purposes
# Initialize random batch of input vectors, for *size = (T,N,C) input = torch.randn(T, N, C).log_softmax(2).detach().requires_grad_()
# Initialize random batch of targets (0 = blank, 1:C = classes) target = torch.randint(low=1, high=C, size=(N, S), dtype=torch.long)
defzero_grad(self, set_to_none: bool = False): for group in self.param_groups: for p in group['params']: if p.grad isnotNone: #梯度不为空 if set_to_none: p.grad = None else: if p.grad.grad_fn isnotNone: p.grad.detach_() else: p.grad.requires_grad_(False) p.grad.zero_()# 梯度设置为0
defadd_param_group(self, param_group): assertisinstance(param_group, dict), "param group must be a dict" # 检查类型是否为tensor params = param_group['params'] ifisinstance(params, torch.Tensor): param_group['params'] = [params] elifisinstance(params, set): raise TypeError('optimizer parameters need to be organized in ordered collections, but ' 'the ordering of tensors in sets will change between runs. Please use a list instead.') else: param_group['params'] = list(params) for param in param_group['params']: ifnotisinstance(param, torch.Tensor): raise TypeError("optimizer can only optimize Tensors, " "but one of the params is " + torch.typename(param)) ifnot param.is_leaf: raise ValueError("can't optimize a non-leaf Tensor")
for name, default in self.defaults.items(): if default is required and name notin param_group: raise ValueError("parameter group didn't specify a value of required optimization parameter " + name) else: param_group.setdefault(name, default)
params = param_group['params'] iflen(params) != len(set(params)): warnings.warn("optimizer contains a parameter group with duplicate parameters; " "in future, this will cause an error; " "see github.com/pytorch/pytorch/issues/40967 for more information", stacklevel=3) # 上面好像都在进行一些类的检测,报Warning和Error param_set = set() for group in self.param_groups: param_set.update(set(group['params']))
ifnot param_set.isdisjoint(set(param_group['params'])): raise ValueError("some parameters appear in more than one parameter group") # 添加参数 self.param_groups.append(param_group)
defload_state_dict(self, state_dict): r"""Loads the optimizer state. Arguments: state_dict (dict): optimizer state. Should be an object returned from a call to :meth:`state_dict`. """ # deepcopy, to be consistent with module API state_dict = deepcopy(state_dict) # Validate the state_dict groups = self.param_groups saved_groups = state_dict['param_groups']
iflen(groups) != len(saved_groups): raise ValueError("loaded state dict has a different number of " "parameter groups") param_lens = (len(g['params']) for g in groups) saved_lens = (len(g['params']) for g in saved_groups) ifany(p_len != s_len for p_len, s_len inzip(param_lens, saved_lens)): raise ValueError("loaded state dict contains a parameter group " "that doesn't match the size of optimizer's group")
# Update the state id_map = {old_id: p for old_id, p in zip(chain.from_iterable((g['params'] for g in saved_groups)), chain.from_iterable((g['params'] for g in groups)))}
defcast(param, value): r"""Make a deep copy of value, casting all tensors to device of param.""" .....
# Copy state assigned to params (and cast tensors to appropriate types). # State that is not assigned to params is copied as is (needed for # backward compatibility). state = defaultdict(dict) for k, v in state_dict['state'].items(): if k in id_map: param = id_map[k] state[param] = cast(param, v) else: state[k] = v
# Update parameter groups, setting their 'params' value defupdate_group(group, new_group): ... param_groups = [ update_group(g, ng) for g, ng inzip(groups, saved_groups)] self.__setstate__({'state': state, 'param_groups': param_groups})
defstate_dict(self): r"""Returns the state of the optimizer as a :class:`dict`. It contains two entries: * state - a dict holding current optimization state. Its content differs between optimizer classes. * param_groups - a dict containing all parameter groups """ # Save order indices instead of Tensors param_mappings = {} start_index = 0
defpack_group(group): ...... param_groups = [pack_group(g) for g in self.param_groups] # Remap state to use order indices as keys packed_state = {(param_mappings[id(k)] ifisinstance(k, torch.Tensor) else k): v for k, v in self.state.items()} return { 'state': packed_state, 'param_groups': param_groups, }
# 进行更新前的数据,梯度 The data of weight before step: tensor([[-0.3077, -0.1808], [-0.7462, -1.5556]]) The grad of weight before step: tensor([[1., 1.], [1., 1.]]) # 进行更新后的数据,梯度 The data of weight after step: tensor([[-0.4077, -0.2808], [-0.8462, -1.6556]]) The grad of weight after step: tensor([[1., 1.], [1., 1.]]) # 进行梯度清零的梯度 The grad of weight after optimizer.zero_grad(): tensor([[0., 0.], [0., 0.]]) # 输出信息 optimizer.params_group is [{'params': [tensor([[-0.4077, -0.2808], [-0.8462, -1.6556]], requires_grad=True)], 'lr': 0.1, 'momentum': 0.9, 'dampening': 0, 'weight_decay': 0, 'nesterov': False}]
注:数据在GPU和CPU之间进行传递时会比较耗时,我们应当尽量避免数据的切换。GPU运算很快,但是在使用简单的操作时,我们应该尽量使用CPU去完成。当我们的服务器上有多个GPU,我们应该指明我们使用的GPU是哪一块,如果我们不设置的话,tensor.cuda()方法会默认将tensor保存到第一块GPU上,等价于tensor.cuda(0),这将会导致爆出out of memory的错误。我们可以通过以下两种方式继续设置。